Introdução
Um sistema de controle é um sistema capaz de agir em seu sinal de saída através de uma variável de controle, sendo que o mesmo pode ser em malha aberta ou em malha fechada. De forma a fazer com que o sinal da saída acompanhe a referência, ou seja, o valor desejado, dentro dos requisitos do sistema, será abordado o sistema de controle em malha fechada aplicado em um conversor CC/CC Buck.
O sistema do conversor aqui proposto é apresentado na Figura \ref{fig:1}, na forma de diagrama de blocos.
Um sistema de controle é um sistema capaz de agir em seu sinal de saída através de uma variável de controle, sendo que o mesmo pode ser em malha aberta ou em malha fechada. De forma a fazer com que o sinal da saída acompanhe a referência, ou seja, o valor desejado, dentro dos requisitos do sistema, será abordado o sistema de controle em malha fechada aplicado em um conversor CC/CC Buck.
O sistema do conversor aqui proposto é apresentado na Figura 1, na forma de diagrama de blocos.
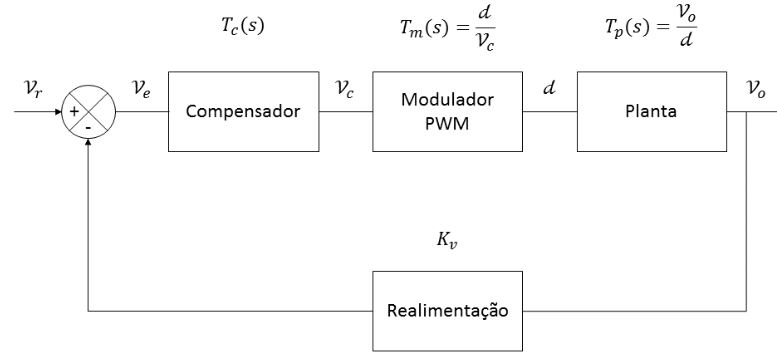
Figura 1. Diagrama de blocos do conversor CC/CC a ser modelado.
Onde temos:
- V_o é a tensão de saída;
- d é o ciclo de trabalho;
- V_c é a tensão do compensador;
- V_r é a tensão de referência;
- V_e é a tensão de erro. Sendo V_e = -(V_r-V_o).
Separadamente, cada bloco será avaliado para então ser dimensionado o sistema de controle que atenda os requisitos solicitados no problema proposto.
Planta
Chama-se de planta o modelo matemático do sistema ao qual deseja-se ser controlado. Dessa forma a planta trata-se da função de transferência T_p(s) do conversor CC/CC Buck, Equação 1.
Sendo v_o o sinal de saída da planta, o sinal d do ciclo de trabalhado do chaveamento do conversor, V_i a tensão de entrada, R_se a resistência série do capacitor C, R_o a carga do sistema, e L o indutor do conversor. Para esta modelagem considerou-se os seguintes valores:
- V_i = 20 V;
- R_se = 0,12 Ohms;
- R_o = 4 Ohms;
- L = 185 uH;
- C = 100 uF.
Na Figura 2 é possível verificar a resposta em frequência da Planta do Sistema.
Figura 2. Diagrama de Bode da planta.
Modulador
O Modulador é inserido no sistema com a finalidade de controlar o sinal de entrada da planta do sistema, isto é, realiza a modulação do ciclo de trabalho d da Equação 1. Da relação entre a saída d e a entrada v_c do Modulador tem-se sua função de transferência T_m:

Sendo V_s a amplitude do sinal dente de serra utilizado na modulação PWM, por comodidade escolheu-se V_s = 3,5 V, fazendo com que o bloco modulador aplique apenas um ganho de 3,5 no sinal oriundo do compensador.
Realimentação
A realimentação no sistema tem como finalidade ler o valor da saída e convertê-lo para a mesma grandeza do sinal de referência, permitindo então que estes sejam comparados. Assim a malha do sistema é então fechada e o controle pode ser controlado automaticamente.
No sistema proposto, a realimentação será realizada em um fator de 1/5, pois por simplicidade de entendimento o valor do sinal de referência será V_r = 1 V, e como o valor desejado para a nossa saída é V_o = 5 V, o ramo de realimentação compensará o valor mensurado. Desta forma a comparação, entre o valor de entrada (referência) e o valor de saída (desejado), pode ser realizada. Desta forma tem-se:
De posse das Funções de Transferência da Planta, Transferência do Modulador e da Realimentação do sistema, é possível definir a Função de Transferência em Malha Aberta Sem Compensador do sistema. Assim segue que:
E sua resposta em frequência é apresentada pela Figura 3.
Figura 3. Diagrama de Bode do sistema em malha aberta sem compensador.
Compensador
O compensador é agente responsável por garantir que o sinal de referência seja atingido conforme os requisitos do sistema. Há três tipos de compensadores aplicado no controle de conversores CC/CC, em função do número de polos e zeros de sua respectiva função de transferência e, principalmente, em função de sua característica de defasagem. O compensador tipo 1 possui apenas um polo na origem, o compensador tipo 2 possui dois polos e um zero já o compensador tipo 3 possui três polos e dois zeros. O diagrama de Bode de H_masc pode ser visto na Figura 2. Ao analisar a Figura 2, nota-se que sua margem de fase é de -155 º. Optou-se por alterar a margem de fase para 60 º, logo o ângulo necessário para corrigir a margem de fase será:

Sendo M = 60 º e P = -155 º o alfa será de 125 º. Logo como o avanço necessário para a correção é maior do que 90 º, deve ser escolhido o compensador do tipo 3.
Após a escolha do compensador do tipo 3, é realizada a sua modelagem, sendo para isso escolhido o método do fator k. O fator k é uma ferramenta matemática para definir a forma e a característica da função de transferência. Independente do tipo de controlador escolhido, o fator k é uma medida da redução do ganho em baixas frequências e do aumento de ganho em altas frequências, o que se faz controlando a alocação dos polos e zeros do controlador, em relação à frequência de corte, f_c, do sistema. Para o compensador do tipo 3, o cálculo de k torna-se:
Com a obtenção de k e sabendo-se que o compensador do tipo 3 pode ser implementado por meio de um amplificador operacional, Figura 4, os valores de seus resistores e capacitores são determinados através das seguintes fórmulas:
Figura 4. Circuito equivalente do compensador tipo 3.
Sendo G o ganho necessário à aplicar ao compensador para que se obtenha a frequência de corte desejada.
De posse dos valores dos componentes eletrônicos do circuito do amplificador operacional da Figura 5, calcula-se sua função de transferência através da seguinte equação:
O diagrama de Bode da função de transferência de T_c pode ser visto na Figura 5, esta é a resposta em frequência do compensador tipo 3 modelado.
Figura 5. Diagrama de Bode da função de transferência T_c.
Sistema de Controle
Obtido então o compensador para o sistema do Conversor Buck proposto, pode-se então verificar se o Sistema de Controle atende às exigências solicitadas.
Como a frequência de chaveamento do Conversor é de 33 kHz, escolheu-se a frequência de corte de 4 kHz, com esta frequência a amplitude, da planta com o modulador e a realimentação, possui uma queda de 19,1 dB e a margem de fase é de 35 º. Deseja-se que a amplitude seja unitária e a margem de fase de 60 º como fora mencionado anteriormente.
Agora com a função de transferência do controlador, podemos então obter a função de transferência em malha aberta do sistema e assim verificar a eficácia do controlador quanto às solicitações. Assim tem-se a função de transferência em malha aberta com compensador:
Com isso, é possível verificar na Figura 6 o diagrama de Bode em malha aberta. Nota-se também que na frequência de corte, 4 kHz, a amplitude é unitária, 0 bB, e a fase de -120 º, margem de fase de 60 º.
Figura 6. Diagrama de Bode da função de transferência em malha aberta com compensador.
Simulação
Neste seção será descrito todos os passos para uma perfeita simulação do sistema proposto, com o auxílio do software de análise de circuitos elétricos e eletrônicos PSIM. A construção do circuito Buck é o primeiro passo a ser realizado, Figura 7, onde representou-se P como sendo uma perturbação no sinal da tensão de entrada, de forma a avaliar a resposta do sistema de controle.
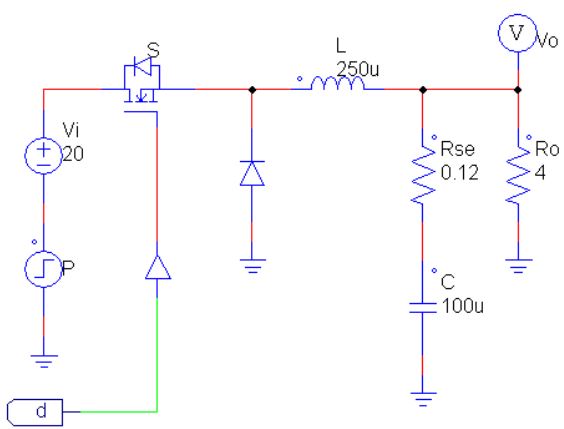
Figura 7. Circuito do conversor Buck simulado no PSIM.
Para simular o sinal do modulador, utilizou-se do circuito visto na Figura 8, onde trata-se de um circuito comparador de tensão com ganho unitário entre o sinal provindo do compensador V_c e o sinal de uma fonte de tensão periódica do tipo dente de serra, com amplitude V_s = 1 e frequência de chaveamento de 33 kHz. Sua saída d é conectada diretamente no gate do MOSFET (componente eletrônico que representa a chave S).
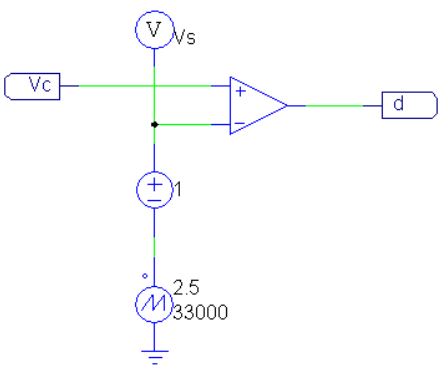
Figura 8. Circuito do Modulador.
Já a etapa de construção do circuito eletrônico compensador tipo 3 dá-se simplesmente pela transferência do esquemático da Figura 4 para o ambiente do PSIM, conforme visto na Figura 9.
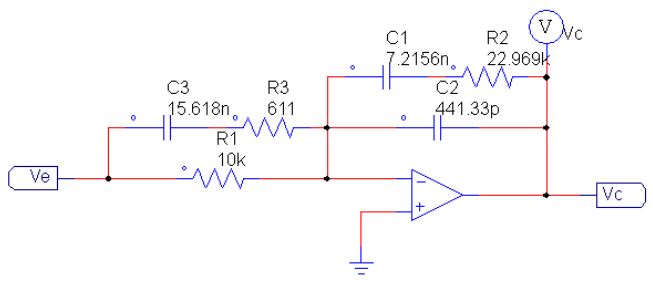
Figura 9. Circuito eletrônico do compensador tipo 3.
Para representar o bloco de soma do sistema de controle da Figura 1, utilizou-se novamente um amplificador operacional na configuração de subtrator de sinais, Figura 10.
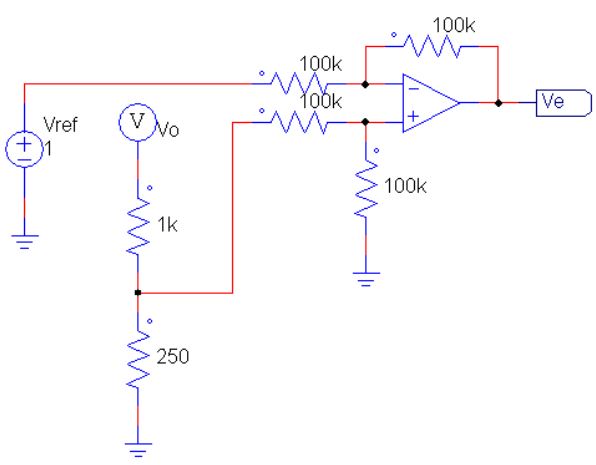
Figura 10. Circuito eletrônico equivalente do bloco somador.
Por fim, para a representação do ganho de realimentação K_v utilizou-se de um simples circuito divisor de tensão, de forma a fazer a normalização da diferenciação entre o sinal de referência V_o e V_r conforme visto na Figura 10.
Resultados da Simulação
Após a conclusão da etapa de construção do circuito de controle aplicado ao conversor Buck, extraiu-se os sinais de tensão de V_i, V_o, V_c, V_s e V_d.
Figura 11. Sinais da tensão do controlador V_c, da fonte de tensão tipo dente de serra V_s e da tensão V_d, respectivamente.
Figura 12. Sinais da tensão de entrada V_i e da tensão de saída V_o, respectivamente.
Nota-se visualmente que a largura de pulso do sinal V_d varia consoante a diferença entre os sinais de V_c e V_s.
Prática
Uma vez que fora modelado e simulado o Conversor Buck em malha fechada passa-se agora para a implementação do circuito em \textit{protoboard} e posteriormente, após verificar o funcionamento correto, o mesmo implementado em uma Placa de circuito impresso.
Para modulação do PWM utiliza-se o Circuito Integrado (C.I.) SG3524, e um C.I. 4N25 para isolação do sinal do circuito de controle da chave. Para chave utiliza-se o MOSFET IRF740, o diodo utiliza-se o 30ETH06.
No circuito de controle utiliza-se o C.I. LM358, um amplificador operacional, para a implementação do bloco somador, comparando a o sinal de referência e a realimentação, e para a implementação do compensador.
Resultados da Prática
Elaborado o circuito na prática alguns sinais são então verificados para visualização de seu funcionamento.
A Figura 13 mostra os sinais dente de serra e a tensão de comparação, fornecida pelo compensador, utilizados para modulação do PWM. Estes sinais foram medidos nos pinos 7, dente de serra, e 2, tensão de comparação.
Figura 13. Sinais de tensão dente de serra (canal 1) e da tensão de comparação para a geração do PWM (canal 2).
Para verificar o sinal de controle proveniente do modulador PWM, foi medido o sinal de acionamento do MOSFET IRF740, Figura 14, onde de acordo com o sinal de erro há uma mudança da largura de pulso do sinal.
Figura 14. Sinal de acionameto do MOSFET do circuito do conversor Buck.
Para por à prova o sistema de controle, variou-se drasticamente a tensão de entrada do conversor CC/CC e observou-se o sinal de saída, o resultado pode ser visto na Figura 15, comprovando a eficácia do sistema de controle.
Figura 15. Verificação da estabilidade do sinal de tensão de saída (canal 1) pela variação da tensão de entrada (canal 2).
Conclusão
Portanto com implementação de uma malha de controle, com um compensador tipo 3 T_c atuando sobre a planta T_p de um conversor Buck é possível fazer com que sua saída de tensão se estabilize no sinal de referência requerido, isto é, garantir que a tensão de saída permaneça constante independentemente das pertubações no sinal de tensão de entrada.


















