
Introdução
Cada vez mais os Veículos Autônomos Subaquáticos (AUVs) estão adquirindo espaço nos setores comerciais, pois suas aplicações que antes destinavam-se exclusivamente ao setor militar agora expande-se para campos como pesquisas subaquáticas, monitoramento ambiental e estudos oceanográficos [1]. Conforme [2] há dois tipos diferentes de veículos AUV, os voam (flight vehicles) e os pairam (hovering vehicles) sobre a água. Os veículos voadores são frequentemente utilizados em inspeções, busca e localização de objetos, enquanto os veículos que pairam são usados para inspeção detalhada e trabalho físico ao redor de objetos fixos. De forma a aprimorar conhecimento na área de desenvolvimento de veículos autônomos subaquáticos, o presente trabalho visa descrever o processo de modelação do AUV (hovering vehicles) projetado pelo Departamento de Engenharia Mecânica da Universidade de Canterbury, figura 1.
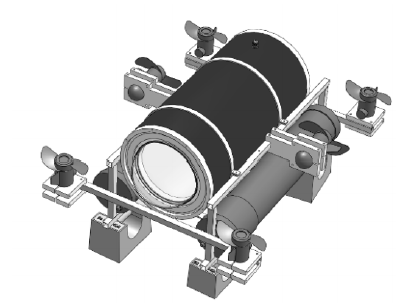
Figura 1: Imagem em 3D do AUV em CAD.
Cinemática
Devido a presença de várias variáveis que afetam diretamente o sistema, como forcas complexas e não lineares, para a implementação do controlo do veículo subaquático faz-se uma abordagem tanto da cinemática e dinâmica, quanto do planeamento da trajetória do sistema em análise, que neste caso trata-se de um AUV.
Primeiramente deve-se introduzir dois sistemas de referência, um global fixo e outro localizado na estrutura do AUV. Assim todos os seis graus de liberdade do veículo são expressos na seguinte forma vetorial em relação ao AUV e ao mundo, respetivamente:

Para relacionar todos os movimentos de rotação do AUV ao mundo (ponto fixo conhecido) utiliza-se os ângulos de Euler. Este método consiste em excetuar uma sequência de três rotações do sistema de coordenadas do AUV para o mundo. Essa sequência resulta em uma rotação em torno de z (yall), y (pich) e x (roll). O resultado é conhecido como a matriz de rotação do corpo para o mundo e pode ser expressa por:

O AUV é representado no espaço de estados com o intuito de facilitar a modelação do sistema. A posição do AUV pode ser descrita com o mesmo vetor do AUV-mundo fazendo com que não haja necessidade de uma transformação do vetor, pois a origem desse vetor é a mesma que o do referencial inercial, desse modo toda translação do veículo já está referenciada na posição inicial. Já a velocidade do AUV e do AUV-mundo podem ser calculadas por:

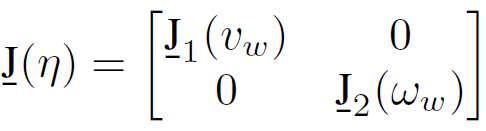
As equações 4 e 5 contém tanto a velocidade linear quanto a velocidade angular em relação ao AUV e ao referencial inercial. A relação entre ambas se dá por:

Onde:

e J(n) representa a matriz de transformação do AUV para o referencial do mundo, isto é:
Deste modo a velocidade linear global pode ser obtida a partir da transformação da velocidade local, isto é, a velocidade do AUV multiplicada pela matriz de rotação, em outras palavras:

resultando em:

De forma análoga, a velocidade angular é dada por:

resultando em:

O mesmo processo se repete para tanto para a aceleração linear quanto para a angular.
Dinâmica
No que diz respeito a dinâmica do veículo, seu modelo baseia-se na equação 14, onde o vetor dos binários dos atuadores pode ser encontrado. Seu valor permite ser utilizado no sistema de controlo dos motores do AUV, fornecendo o valor necessário para a geração do torque.

onde:
- t é a força/torque associado;
- M é a matriz das inércias do corpo rígido mais uma massa adicional;
- C é a matriz dos binários centrífugos e coriolis do corpo rígido mais uma massa adicional;
- D é uma matriz quadrática e de arrasto linear;
- g é a matriz que contém os termos gravitacionais.
Portanto M é dependente de:

Ma é a massa adicional devido a ação do fluido sobre o corpo do veículo em movimento [3], acrescentando uma massa de água ligada ao veículo. Quando o veículo possui simetria em todos seus planos e o sistema de coordenadas do seu corpo encontra-se sobre seu centro de massa. a matriz que representa a massa do corpo rígido e a matriz que representa a massa adicional resultam em:

As letras X, Y, Z, K, M e N representam derivadas parciais em relação aos seus sub-índices. A matriz dos termos Centrífugos e de Coriolis também possui dois termos, isto é:

CRB(v) é termo relacionado com o corpo rígido do AUV e Ca(v) é o termo relacionado com a hidrodinâmica, ou seja:

Os coeficientes são equações que relacionam as derivadas parciais cada um dos seis graus de liberdade encontrados no veículo, consoante [2].
O termo D(v) na equação 14, agrega os termos lineares e quadáaticos do arrasto devido ao amortecimento
hidrodinâmico, onde o efeito das forças de sustentação é desprezado, face a magnitude da forçaa de arrasto. Assim D(v) é dado pela soma de:

com

Sendo:

Por fim a matriz coluna de gravidade e flutuabilidade é constituída por dois vetores: o vetor contendo a força da gravidade, equação 24 e o vetor de flutuabilidade do AUV, equação 25.

onde ro é a densidade do fluido, g a aceleração da gravidade e V o volume do fluido ocupado pelo AUV. Posteriormente deve-se conhecer o centro de massa e de flutuabilidade do AUV, pois com suas coordenadas é possível descrever g como sendo:

Planeamento de Trajetória
Em robótica móvel, independente do meio onde é destinado o robô (terrestre, aéreo ou aquático), é de suma importância o planeamento do trajeto utilizado pelo autômato para que ele realize sua missão da melhor forma possível e mantendo sua integridade, uma vez que ambientes não são ideais e podem haver obstáculos previsíveis ou não. O planeamento da trajetória de um AUV pode se tratar de uma tarefa complexa e dependente do emprego de bastante tempo, dependendo da aplicação e meio onde tal veículo será utilizado. Diversos fatores devem ser levados em consideração, desde a construção da estrutura do robô até a dinâmica do recinto hidrográfico onde o mesmo será submergido. Há, basicamente, duas maneiras de realizar a escolha do caminho que será realizado pelo AUV: A estimativa do trajeto, quando o ambiente é total ou parcialmente conhecido, e/ou por seguimento, em casos onde o conhecimento do local a ser explorado é pobre ou nenhum. A utilização de sensores é de grande importância para a localização e percepção do ambiente onde o veículo está operando. De acordo com [4] e [5], existem algumas maneiras de estimar o local e os caminhos para o trajeto e formas de escolher o melhor destes caminhos em termos de custos para a plataforma, em geral custos de energia e/ou tempo. As subsecções adiante discutem um pouco estas maneiras de escolha do trajeto, além de expor o modelo de movimento e as manobras elementares para um veículo subaquático. Antes de continuar algumas atribuições serão realizadas:
- O espaço de configuração será aqui chamado de C-Space e representado por C;
- O C-Space está definido para um espaço em duas dimensões (2D);
- O espaço ocupado pelos obstáulos é representado por O;
- O espaço livre para o trajeto é representado por L, assim L = C - O;
- O ambiente onde o veículo é submerso não possui correntes aquáticas;
- O AUV é um veículo não holonômico, ou seja, não pode se mover em todas as direções;
- O veículo é apresentado apenas por um ponto que corresponde ao seu centro de massa;
- O localização do robô é descrito por q = (x; y; ), onde x e y representam a posição e a orientação do robô.
Campo Potencial

Decomposição do Espaço em Células
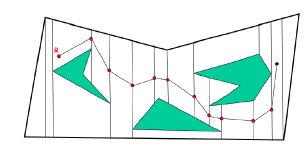
Pesquisa em Grafos
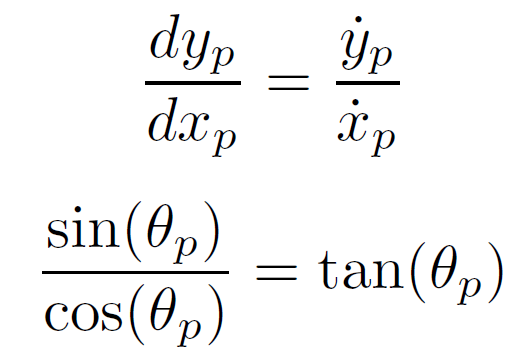
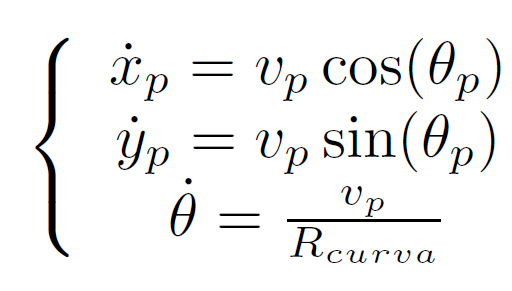
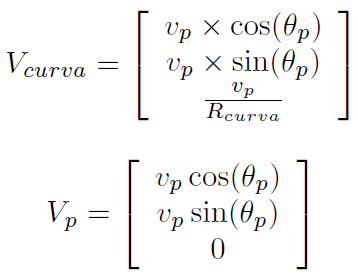
Modelo do Movimento e Manobras Elementares

- xp yp representam a posição no instante p;
- Thetap representa a orientação no instante p.
Intervalos de tempo muito curtos remetem a:


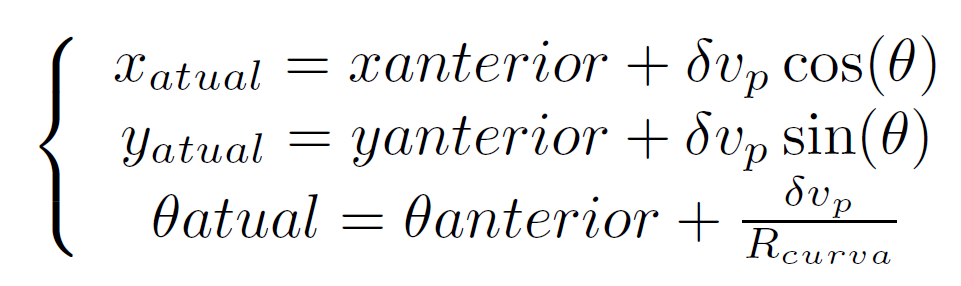
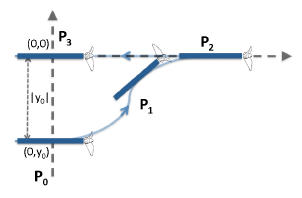
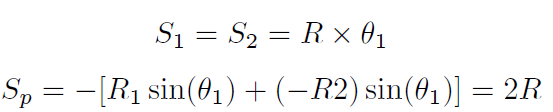
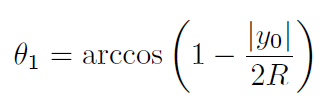
- Translação Lateral, que tem como objetivo manobrar o veículo de uma trajetória retilínea para outra paralela a esta;
- Rotação Pura, que é a manobra para rotacionar o veículo em um ângulo theta, sobre seu próprio eixo.
Por conta das restrições físicas do AUV, há algumas particularidades quanto à realização das manobras descritas, como segue.
Translação Lateral

Rotação Pura


Conclusão
Referências