Introdução
A discretização de um sinal é um dos processos mais utilizados em processamento digital de sinais, pois permite representar um sinal contínuo em amostras bem definidas espaçados por um determinado período de tempo. Dessa forma o presente trabalho visa analisar a diferença entre três métodos de integração numérica, são eles: método de Backward Euler, método de Forward Euler e método de Tustin. Após conhecidos os métodos, os mesmos serão aplicados sobre o sinal de um filtro passa baixas, onde seu sinal em tempo contínuo será utilizado como sinal de referência para a comparação entre todos os métodos.
Método de Backward Euler
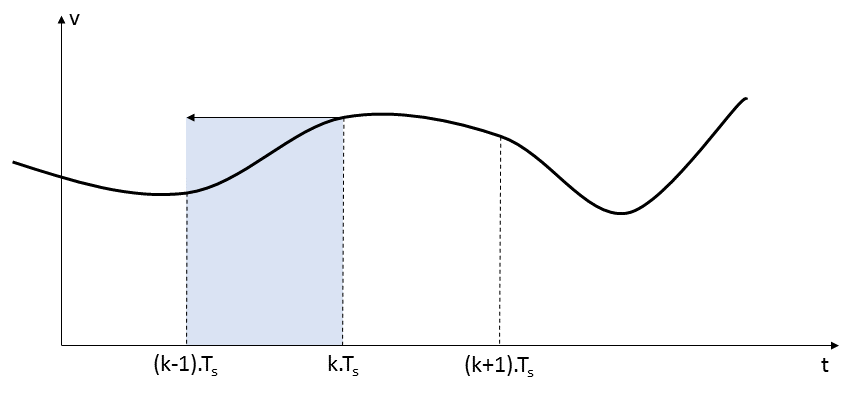
O primeiro método a ser abordado é conhecido como Backward Euler. Este método consiste em realizar a integração numérica do sinal utilizando a entrada atual e extrapolando-a a uma amostra até o instante anterior(passado), conforme a Figura 1.
Figura 1. Representação Gráfica do Método de Backward Euler.
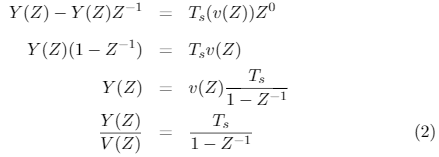
Como a integral de um sinal y(kTs) é simplesmente a área abaixo da curva v(t), a integração numérica dá-se da seguinte forma:
Sendo k o instante de tempo atual e Ts a taxa de amostragem. Em seguida é aplicada a transformada Z, resultando em:
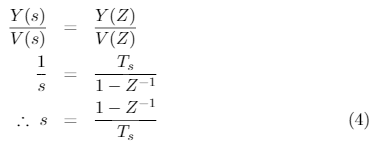
Sabendo-se que a Função de Transferência de um integrador no domínio de $s$ é dada por:
Sabendo-se que a Função de Transferência de um integrador no domínio de s é dada por:
Faz-se sua equivalência em Z, tornando-se em:
Este método tem a característica de realizar a aproximação observando a amostra anterior o que resulta para a Figura 1 um erro maior do que todo o sinal entre os instantes de kTs e (k-1)Ts.
Método de Forward Euler
O método Forward Euler consiste em realizar a integração numérica do sinal utilizando a entrada anterior e extrapolando-a a uma amostra até o instante atual. A Figura 2 demonstra tal método.
Figura 2. Representação Gráfica do Método de Forward Euler.
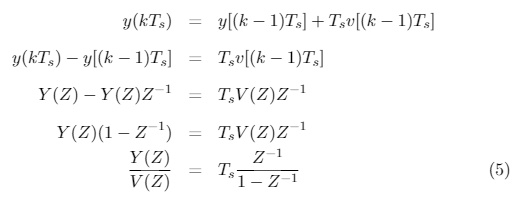
A área aproximada, ou a integral de v(t) é dada a seguir:
Equalizando a Função de Transferência no domínio de Z com a Função de Transferência no domínio de s, tem-se:
Observando-se a Figura 2 é notório que há erro grande, entre o sinal e a integração, entre os instantes de kTs e (k-1)Ts.
Método Trapezoidal
O método Trapezoidal, ou método de Tustin (Bilinear), consiste em calcular a área sob o sinal v(t) considerando a média entre as amostras atual e passada. Como mostrado na Figura 3.
Figura 3. Representação Gráfica do Método de Tustin.
Assim tem-se:
Da mesma forma realizada nos métodos anteriores, iguala-se a Função de Transferência no domínio Z com a Função de Transferência no domínio s. Assim tem-se:
Neste método verifica-se que o erro entre o sinal e a aproximação pela integração, através do gráfico da Figura 3, é pequeno entre os instantes de kTs e (k-1)Ts.
Implementação
De forma a realizar a comparação entre todos métodos abordados anteriormente, todos serão implementados através do software Matlab sobre a resposta de filtro passa baixas cuja expressão (na forma padrão) em s é:
Onde wc representa a frequência de corte do filtro passa baixas. Os parâmetros considerados no projeto do filtro passa baixas foram:
-
- fs = 40 kHz;
- fc = 1 kHz;
- Ts = 25 us.
Onde fs é a frequência de amostragem do sinal. O primeiro mapeamento a ser abordado será o de Backward Euler. Assim para realizá-lo, basta substituir s por seu respetivo mapeamento na Equação 9, isto é:
Para realizar a representação pelo diagrama de Bode é necessário conhecer os coeficientes a e b da expressão, para isso é feita uma simplificação de forma que a expressão se assemelhe a:

Onde k é o ganho, a0, a1 e a2 são os coeficientes do numerador e b0, b1 e b2 são os coeficientes do denominador. Após realizar a identificação de todos os parâmetros, posteriormente eles foram utilizados como dados de entrada para função freqz do software Matlab, que realiza a representação por diagrama de Bode da expressão abstraída pelos seus parâmetros. Portanto o mesmo processo foi repetido para o restante dos métodos para construir a Figura 4, que exibe a resposta em magnitude para todos os métodos, sendo que nela também é possível observar a resposta em magnitude do sinal de um filtro contínuo passa baixas. Ao analisar a Figura 4 nota-se que em todo momento tanto a resposta do método de Backward Euler quanto a do método de Forward Euler se distanciam da resposta do filtro contínuo, por outro lado o método de Tustin possui uma boa aproximação para uma vizinhança de cinco décadas, acima disso sua resposta começa a distanciar-se da resposta do filtro contínuo.

Figura 4. Comparação das Amplitudes das Respostas em Frequência.
Agora, ao analisar a resposta em Fase de todos os métodos em comparação à resposta do filtro contínuo o resultado torna-se o ilustrado na Figura5.
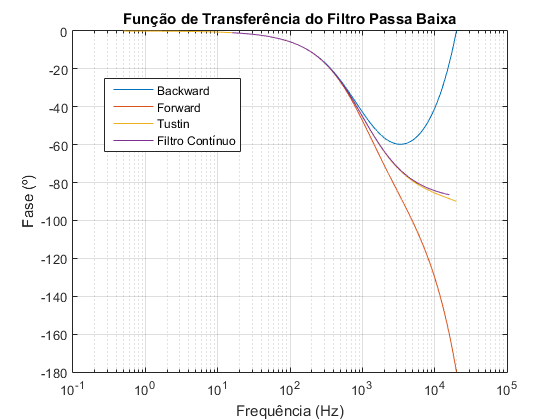
Figura 5. Comparação das Fases das Respostas em Frequência.
Nesta análise também obtém-se as mesmas conclusões, ou seja, tanto o mapeamento por Backward Euler quanto o de Forward Euler possuem uma distância grande do sinal do filtro contínuo, quando comparados com sinais de frequências acima da frequência de corte, por outro lado, eles se comportam razoavelmente bem em sinais de frequências abaixo da frequência de corte. Nota-se que o mapeamento por Tustin obtém a melhor aproximação do sinal contínuo, desde de o mesmo não permaneça próximo à frequência de amostragem.
Conclusão
Contudo, pode-se afirmar que os métodos de discretização cá abordados são eficazes, ou seja, podem ser empregados para o processamento digital de um sinal e apresentará resposta similar à resposta em um processamento contínuo. Porém, é evidente que, o método mais eficiente é o método de Tustin, que próximo à frequência de corte possuem os valores de amplitude e de fase bastante próximos de um sinal analógico.